Jernbaneartikler på Jernbanen.dk
Radiostyrede tog til Thisted
Af: Jan Eriksen
Dette var overskriften på en artikel i Ingeniøren nr. 8 1990, forfattet af Hans True. Artiklen beskriver DSBs planer dengang sidst i 1980erne om at bruge moderne teknologi til driften. Man havde i længere tid kørt forsøg ved Grønttorvet på en strækning, der forløb langs S-banen mod Køge. Strækningen var enkeltsporet med en to-sporet krydsningsstation.
Systemet som man havde kig på, var baseret på det nordamerikanske ATCS-system. ATCS, ikke at forveksle med ATC, står for Advanced Train Control System, og er meget mere end ATC (Automatic Train Control). Se en nærmere beskrivelse i et senere afsnit. Systemet blev udviklet i samarbejde med firmaet Procos A/S, der også stod for præsentationen af systemet.

Til disse forsøgskørsler havde man rådighed over MY 1126, MX 1021 samt Bhs 291 (OHJs nummer, da den var købt tilbage), og det var i den forbindelse, at de blev malet inspireret af mønstre kendt fra elektronik-industrien. Til ATC-test havde man MX 1016, så det er forkert at kalde de to ”graffiti”-maskiner for ATC-MY hhv. ATC-MX.

Jeg havde sammen med Flemming Jakielski (der har taget de viste fotos) i september 1989 fornøjelsen af at deltage i et arrangement arrangeret af Dansk Ingeniør Forening, hvor vi fik demonstreret systemet og kørte en tur i Bhs-vognen med krydsning på Grønttorvet station.

For de unge læsere vil det sandsynligvis undre noget, at digital radiokommunikation var nyt, men vi taler hi-tech dengang med PC´ere kaldet PC/AT og PC/XT (som vel snart er glemte begreber ligesom datamat). Artiklen er skrevet ud fra samtidige notater, så jeg vil benytte den terminologi, som anvendtes dengang. Det er så samtidigt morsomt at se datidens tanker holdt op i mod den nu aktuelle situation med Signalprogram og ERTMS.
Prøvestrækningen
Man havde valgt det gamle spor fra Gb til Grønttorvet og videre mod Valby Gasværk som prøvestrækning. Strækningen var med både TIB og tjenestekøreplan, og man havde stationerne Valby Gasværk, Grønttorvet (med krydsningsspor), Gåsebæk, Frederiksholm og Vasby.
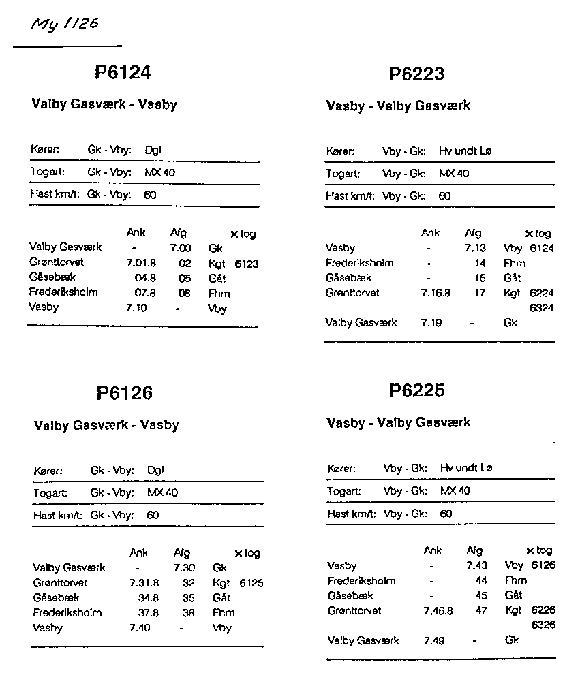
Selv om man kun var i gang med prototypen, så var systemet ganske stort bygget op. Der var tre linjer: G, Gg og Gx med køreplaner efter S-togs-model. Ud over køreplaner var der også udarbejdet maskinløb mm. Der var også ophængt stationsskilte på de steder, der svarer til stationerne. På billedet af MX 1021 kan stationsskiltet for Grønttorvet ses på lysmasten til højre for maskinen.
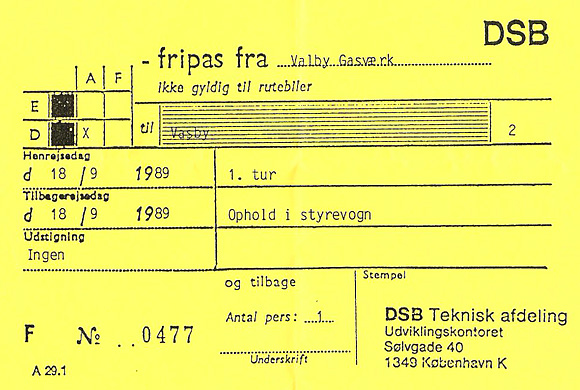
Der var gjort noget ud af præsentationsdagen, for vi blev alle udstyret med et ”fripas” og tildelt forskellige ture, da vi blev delt på et par hold. Mens det ene hold kørte, så var det andet på visit i fjernstyringscentralen.
Føromtalte mandag fik vi så lejlighed til en tur med toget. MY 1126 kørte solo og vi fik plads i Bhs 291. Første tur var med P6324. Inde i BHS´en viste displayet ”Linie Gx til Grønttorvet Afgang 07.06” (den lokale tid, idet vores ure viste mandag eftermiddag godt 15.10). Da afgangstiden nærmede sig gik der åbenbart kludder i systemet, idet skiltet nu forkyndte ”Tak for i dag. På gensyn”. Nå vi kom dog af sted et par minutter efter.

På Grønttorvet returnerede vi til Valby Gasværk, hvor vi ”skiftede” til line Gg, tog 6224. Denne gang kom vi af sted til tiden, og krydsede på Grønttorvet P6223 (MY 1126). Disse kørsler foregik helt uden manuel indblanding, andet end den kommando til at overføre togenes køreplaner fra centralen til togene og vi kunne se lokomotivføreren i BHS-en hele tiden sidde med hænderne i skødet. Ifølge køreplanen skulle vi køre 60 km/t, og den hastighed blev også opnået mellem Gåsebæk og Frederiksholm.
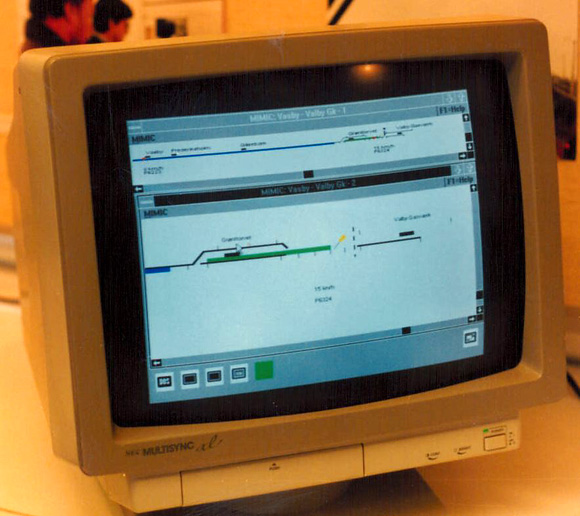
Efter køreturen var det tid til at besigtige ”fjernstyringscentralen”, ”Train Brain Control Center”, der var indrettet i en udrangeret Bg el. Bgc-vogn. Her var selve centraldatamaten placeret og hertil var koblet yderligere en PC, som styrede det grafiske display og dialogen med fjernstyringslederen.

ATSC
I Nordamerika var bl. a. Burlington Northern (BN) i gang med et radiobaseret system ATCS. Idéen var, at alle stationer og tog stod i digital radioforbindelse med en central fjernstyringsdatamat. Den store fordel her er jo, at man undgår at trække kabler ud til signaler og langs strækningen. Måske ikke den store udfordring i flade Danmark, men tænk på de amerikanske selskaber, der skulle udruste strækninger længere end det danske jernbane net og så igennem Rocky Mountains. Systemet var også forberedt på, at der var radiodøde områder og her kunne togets computer så kommunikere direkte med stationens computer, således at lokomotivføreren kunne fjernstyre sporskifternes stilling.
Den centrale datamat kendte køreplanerne og styrede stationerne samtidigt med, at der blev givet køretilladelser og lignende til togene. Disse køretilladelse kom frem på en skærm i togets førerrum og den kunne også rumme oplysninger om nedsat hastighed (LA), endda plottet ind som en skematisk vist sporstrækning. I DSBs forsøg havde man udvidet systemet til også at kunne sende beskeder, der vistes på et display i toget til publikum. Systemet var også forberedt, så den lokale sporkolonne selv kunne inddatere lokale hastighedsnedsættelser, f. eks. ved sporarbejder og dette ville så øjeblikkeligt være at se på førerrums displayet i de tog, der nærmerede sig området.
Det var også muligt i systemet, at sende data fra toget til centralen. Ud over data om togets hastighed og position, så kunne man også sende data om fysisk tilstand, eksempelvis olieforbrug.
ATCS-systemet var et godt specificeret system og man valgte det som udgangspunkt netop ud fra et standardiseringssynspunkt. Alle specifikationerne kunne være i 6-8 ringbind. Specifikationerne var bygget op med flowcharts, der for eksempel viste, hvorledes proceduren var for passage af et sporskifte.
I det nordamerikanske system var der ikke regnet med, at togene skulle være førerløse, men DSB havde interesse i dette, da man stod foran en større anskaffelse af nye S-tog og man havde ønske om fornyelse af sikringsanlæggene. Målet var at opnå radikale besparelser (færre komponenter i form af signaler og sporisolationer), mindre personale og at opnå større fleksibilitet. Der fandtes 4 niveauer i ATCS, hvor niveau 10 var det laveste og 40 det højeste. DSB gik efter en niveau 30-løsning, hvor man kunne benytte trådløs kommunikation, men ikke køre førerløst.

Prototypen
DSB havde nogle flere ønsker til systemet og derfor udvidede man det. Der var meget begrænset sikkerhed indbygget i det nordamerikanske ATCS. En af udvidelserne var at anvende transpondere i sporet på bestemte placeringer, og man gav så toget besked om, hvornår de skulle møde en transponder. Fandtes transponderen ikke på det forventede sted, så skunne toget nødbremses. Transponderne kan sammenlignes med de kendte ATC-baliser, men forskellen er, at transponderen ikke er intelligent på samme måde som en ATC-balise. En transponder kan kun sende et ti-cifret tal, men de behøver så ikke nogen strømforsyning og altså ikke noget kabel.
Til radiokommunikationen havde man 6 kanaler i 900MHz-området, og man regnede men en kommunikationshastighed på 4800 Baud, med option til at komme op i 9600 Baud. I lokomotiverne havde man 2 stk. PC/AT eller PC/XT og som centraldatamat anvendtes en PS/2-computer. Som kommunikationsprotokol skulle anvendes X25 og HDLC.
På præsentionstidspunktet havde man et ”rimeligt klart” system. Der manglede nogle rettelser; bl. a. var bremsekurverne ikke helt på plads. Man kaldte det ”komfort-kørsel”, men det er et andet ord for, at når systemet skulle bremse et tog, så var det ikke behageligt for passagererne. En yderligere udbygning var en mulighed for ændret hastighed i kurver, hvorved man kan undgå at skulle anvende kurvestyrede tog. Endeligt manglede man så ”lige” en funktion til at retstille sporskifter før afgang.
Tidsplan
I forsøget var første mål at få bygget og testet en prototype på ”niveau 30” (ikke førerløst). I efteråret 1989 var man så langt med disse testkørsler, at man overvejede et fuldskala-forsøg på Thybanen (Struer – Thisted). Tidsplanen lød:
15. sept. 1989: Udbudsmateriale sendt til leverandører
15. dec. 1989: Tilbud skal være afgivet
1. kvartal 1990: Kontraktindgåelse
3. kvartal 1990: Ibrugtagning
En ukendt faktor på det tidspunkt var, at EF var i gang med overvejelser om et fælles europæisk system, og dette var en ”dark horse”.
Efterskrift
Efter Hans Trues artikel i Ingeniøren i 1990 er der ikke rigtigt sket mere med systemet. Der skal så gå en del år, før man får formaliseret et fælleseuropæisk system. Først i 1990´erne deltager DSB i forarbejderne til en EU-SR (Europæisk Sikkerhedsreglement) og så har man et ERTMS-system skitseret i slutningen af 1990´erne.
Som med al teknik, så tager det tid at udvikle og afprøve tingene, og så er der stadigt ikke noget funktionsdueligt ERTMS-niveau 3 system kørende, som ovenstående prototype jo i en vis grad ligner. Dog har vi fået førerløs metro, men allerede i midten af 1980´erne var disse en del af inspirationen til ATCS-systemet, bl. a. Sky Train i Vancouver. Af andre datidige systemer skal også Docklands Light Rail i London og to metro-systemer i Frankrig (Lille og Lyon) nævnes.
Næste artikel:
Københavns Frihavns-Aktieselskab
Københavns Frihavns-Aktieselskab
Jernbanelinks
Arkivet for jernbaner
Danmarks Jernbanemuseum
Dansk Jernbane Klub
Danske veterantogsoperatører
Det fyenske sidespor
Erik Juul-Pedersen
Erik V. Pedersen
Eyolfs jernbanebilder
Hedelands Veteranbane
Industribaner i Danmark
Jernbanearkivalier
Jernbanekilder
Mortens Jernbanefotos
Mosebanen
Nordisk Jernbane-Klub
Nordjyllands jernbaner
Nordsjællands Veterantog
Ole Dinesens jernbanebilleder
Simontog.dk
Skovbo Jernbane-Arkiv
Stücklers blog
Syd Fyenske Veteranjernbane
Sydjyllands Veterantog
Thomas Boberg Nielsen
Tog-billeder.dk
Vestsjællands Veterantog
Veterantog Vest
Danmarks Jernbanemuseum
Dansk Jernbane Klub
Danske veterantogsoperatører
Det fyenske sidespor
Erik Juul-Pedersen
Erik V. Pedersen
Eyolfs jernbanebilder
Hedelands Veteranbane
Industribaner i Danmark
Jernbanearkivalier
Jernbanekilder
Mortens Jernbanefotos
Mosebanen
Nordisk Jernbane-Klub
Nordjyllands jernbaner
Nordsjællands Veterantog
Ole Dinesens jernbanebilleder
Simontog.dk
Skovbo Jernbane-Arkiv
Stücklers blog
Syd Fyenske Veteranjernbane
Sydjyllands Veterantog
Thomas Boberg Nielsen
Tog-billeder.dk
Vestsjællands Veterantog
Veterantog Vest



Siemens Desiro / DSB litra MQ indsættes i drift
Læs i denne artikel om forhistorien, bygningen, godkendelsen og ibrugtagningen af nye Siemens Desiro togsæt til DSB i 2002. Tekst og billeder er af DSB´s projektleder for litra MQ Hans Werner Hansen.
Læs mere